With the large-scale popularization of machine vision and the improvement of industrial assembly line speed and the accuracy, the line scanning system is increasingly being recognized by visual engineers and end users.
Line Scan System
A line scanning system is usually used on the occasion that there is relative motion between the measured object and the camera. The image is acquired line by line through line scan cameras. The maximum line rate of line scan cameras usually is very high. For example, Contrastech’s Mars2048-50LGM could operate at a maximum line rate of 50 kHz, or at a maximum of 50,000 lines per second.

The difference of the image acquired by line scan cameras and area scan cameras is that the length of the image acquired by line scan cameras could be infinitely long. Then, the software will cut this "infinitely long" image into certain height images to do real-time processing or put it into the buffer for later processing. ContrasTech’s line scan cameras all support 256MB onboard buffer, for data transmission and image reload under burst mode.
line scanning
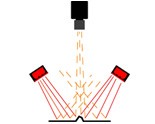
Generally, a line scanning system includes vision part and motion control part. The vision part contains line scan cameras, lens, light source, image grabber and vision software. The motion control part includes motor, motor driver, motion control card or PLC, and sometimes also need an encoder in order to ensure the synchronization between the collection of images and conveyor belt.
Due to a large amount of line scan information, it will need a high performance of the industrial computer with large capacity memory and the hard disk; also its motherboard should provide PCI, PCI-E or PCI-X slot.
Generally, the way to choose an area scanning system is usually in this order: Camera→Lens→Light source. It is similar to line scan system. First, determine the resolution and line scan speed of the camera by requirements of the speed and the size of the detail to be inspected. Then choose a right lens with right interface. Last, choose a right light source.
Selection of line scan cameras
A system scanning a 1600mm wide object which requires a pixel with a horizontal distance of 1mm. This would be the smallest feature size of the object. In order to calculate the required camera resolution for this application, you take the field of view and divide by the smallest feature size (which in this case is 1mm). The resulting calculation would be 1600/1= 1600 pixels. Therefore, this application would need a camera with a resolution of at least 1600 pixels.
line scan cameras
Cameras are available with a variety of fixed sensor resolutions (none of which are 1600) so the best choice would be a camera with 2048 pixels. The 1600mm field of view will be applied across the 1600 pixels of the array and a minimum feature size of 1mm will be maintained. Since the camera has an array of 2048 pixels there will be pixels on either side of the image which will extend beyond the field of view. So if you get the pixels fully used, the actual minimum feature size of the object will be changed. The resulting calculation would be 1600/2048=0.8mm.
Camera speed also needs to be considered. A standard ContrasTech’s Mars2048-50LGM camera will operate at a maximum line rate of 50 kHz, or at a maximum of 50,000 lines per second. If you were to use this camera with this case application, where one line represents 1mm, the system could run at a maximum object speed of 22000mm per second. The minimum line rate of the camera would be 22000/0.8mm=27.5KHz so Mars2048-50LGM could fit the requirements.
Selection of lens for line scan cameras
The common resolutions of line scan cameras are 1K, 2K, 4K, 6K, 8K, 12K; and the pixel sizes are 5μm, 7μm, 10μm, 14μm. Therefore the sensor size could be from 10.240mm (1K*10μm) to 86.016mm (12K*7μm). Obviously, C-Mount can not meet the requirements, because the largest compatible sensor size for C-Mount can only up to 22 mm, which is 1.3inch. And many line scan camera’s mounts are F-Mount, M42*1, M72*0.75. Different lens mounts have different Flange distance, which also determines the different working distance.
Magnification(β): After the resolution and pixels of the camera are determined, then you could know the sensor. ContrasTech’s Mars2048-50LGM have a resolution of 2048pixels and 10μm pixel size. The resulting calculation of the sensor size is 2048*10μm=20.48mm. Therefore, the Magnification could be calculated by this simple formula: β= sensor size/FOV.
Flange Distance: It means the distance from the camera mount plane to the sensor. It’s quite an important parameter, which is determined by each manufacturer according to their own optical design. Cameras from different manufacturers have different flange distances, even they have the same lens mount.
With magnification, lens mount and flange back, then the working distance and the length of the extension tubes could be determined.